The side view sonar acoustically scans the surface of the seabed. It consists of the sonar fish, the pull cable, the sonar recorder, and the recording unit. The sonar fish is a streamlined body of about 1.5 m in length, which contains a radiation-measuring unit and a recording unit. It is towed through the water behind the ship on the towing cable (transmission cable).
In contrast to ship-based sonar, the sonar fish “floats” at an almost constant height over the sea floor, which ensures a constant scanning range. The sonar fish belongs to the so-called two-beam systems. It emits an acoustic signal to each side, which spreads out in the water column in the form of a sound beam pointing downwards. The much weaker return signals are recorded by the recording unit in the sonar fish and forwarded to the recording unit on the ship using the transmission cable.
There, a computer uses these signals to calculate the areal gray value distribution as a function of the signal strength of the sea floor, as can be seen in the examples shown here. Today, multi-frequency devices are mostly used, e.g. with a 100 kHz signal for wider areas with coarser resolution and with a lower 500 kHz signal for narrower areas with a higher resolution.
Marine research infrastructure
3D-Laserscanner FARO Focus 3D-130
Artec Space Spider 3D Scanner
This high-resolution, handheld 3D scanner based on blue light technology is ideal for capturing small objects or fine details in high resolution. It has a capture accuracy of 0.05 mm without the need for targets.
This drone allows cm to take accurate images of the sampling areas. The images can later be merged into a map on the computer and geo-referenced by the drone’s built-in GPS. This allows for better planning of investigations and sampling in the field and tracking of changes over time. In addition, the drone can be used to create 3D models by approaching and photographing the target from multiple angles.
A scanning electron microscope (SEM) achieves magnifications of up to 100,000 times. In the SEM, an electron beam is passed line by line across the object to be imaged (rastered). This knocks electrons out of the surface of the object, which are then collected by a detector. This produces a detailed black and white image of the scanned surface. The SEM is equipped with a secondary electron detector (SE), a backscattered electron detector (BSE), and a cathodoluminescence detector (CL). In addition, a microcomputed tomography detector is also attached to the sample chamber (see below).
In micro-computed tomography (micro-CT), an X-ray beam passes through the object and is picked up by a detector on the other side. Several hundred such images are taken from different angles and combined to form a three-dimensional image. This makes the internal structure of objects visible in a non-destructive way and can be displayed with a much finer resolution compared to clinical CT.
Our micro CT is a detector on the VEGA 3 scanning electron microscope (SEM). The specimens are placed on a special table in the SEM vacuum chamber. This results in a maximum sample size of less than 5 mm. The penetration of the sample by X-rays is limited by the maximum voltage of the SEM cathode (30kV). The maximum resolution is 0.001 mm.
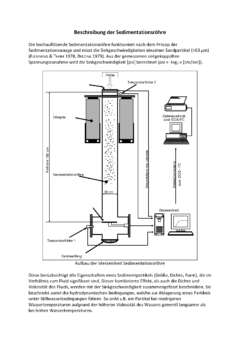
The principle of the settling tube, as with the Atterberg cylinder, is based on the rate of fall of the various grain sizes within a cylinder through a liquid. The sediment sample must be desalinated and separated from silt components by washing through a 0.063 mm sieve. The rate of fall depends on the grain shape, the surface condition of the grain, and the temperature of the liquid. These parameters are taken into account when calculating the grain sizes.
The Sedigraph is used to determine grain sizes smaller than 0.063 mm by means of X-rays. The sample must be desalinated and free of organic matter. The dry silt is ground and homogenized by ultrasound. In the sedigraph, the solution is loaded into a cell and measured over a certain period of time, which depends on the sampled grain size. The grain size is a result of the changing concentration of sediment density in the cell, which is detected by the X-rays as changing passage numbers. Uncertainty factor of this method is the non-determinable homogeneity and splitting of the sample by ultrasound. This is because the longer one sonicates, the more the clay minerals are fragmented.
Acquisition and commissioning: newbuilding 1976 in Oldersum/East Frisia, financed by the Federal Minister of Research and Technology (90%) and the State of Hesse (10%);