Meeresforschung kann nur begrenzt von Land aus betrieben werden. So nutzen wir zur Beantwortung wissenschaftlicher Fragen neben neuesten und altbewährten Technologien auch kleinere und größere Wasserfahrzeuge. Im Folgenden finden Sie eine Übersicht über unsere Arbeitsgeräte im Forschungsalltag, unsere Arbeitsboote und den Forschungskutter „SENCKENBERG“.
ARBEITSGERÄTE
3D-Laserscanner FARO Focus 3D-130
3D Scanner Artec Space Spider
Dieser hochauflösende, auf Blaulicht-Technologie basierende 3D-Handscanner ist ideal für die Erfassung kleiner Objekte oder feiner Details in hoher Auflösung. Er besitzt eine Erfassungsgenauigkeit von 0,05 mm ohne Notwendigkeit von Targets.
Diese Drohne ermöglicht es cm genaue Bilder der Beprobungsgebiete zu erstellen. Die Bilder können später am Computer zu einer Karte zusammengelegt werden und durch das eingebaute GPS der Drohne georefernziert werden. Dadurch lassen sich Untersuchungen und Probenahme im Feld besser planen und zeitliche Veränderungen können nachverfolgt werden. Zusätzlich können mit der Drohne 3D Modelle erstellt werden, indem die Drohne das Ziel aus mehreren Winkeln anfliegt und abfotografiert.
Ein Rasterelektronenmikroskop (REM) erreicht bis zu 100.000-fache Vergrößerungen. Im REM wird ein Elektronenstrahl Linie für Linie über das abzubildende Objekt geführt (gerastert). Dadurch werden Elektronen aus der Oberfläche des Objekts herausgeschlagen und diese mit einem Detektor aufgefangen. Daraus entsteht ein detailreiches Schwarzweißbild der abgerasterten Oberfläche. Das REM ist ausgestattet mit einem Sekundärelektronendetektor (SE), einem Rückstreuelektronendetektor (BSE) und einem Kathodolumineszenzdetektor (CL). Darüber hinaus ist an der Probenkammer auch ein Mikrocomputertomografiedetektor angebracht (siehe unten).
Bei der Mikrocomputertomographie (Mikro-CT) durchdringt ein Röntgenstrahl das Objekt und wird auf der anderen Seite von einem Detektor aufgefangen. Etliche Hundert solcher Bilder werden aus verschiedenen Blickwinkeln aufgenommen und zu einem dreidimensionalen Bild zusammengesetzt. So wird die innere Struktur von Objekten zerstörungsfrei sichtbar und kann im Vergleich zum klinischen CT mit einer viel feineren Auflösung dargestellt werden.
Unser Mikro-CT ist ein Detektor am Rasterelektronenmikroskop VEGA 3 (REM). Die Proben werden auf einem speziellen Tisch in der REM-Vakuumkammer platziert. Daraus ergibt sich eine maximale Probengröße von unter 5 mm. Die Durchdringung der Probe mit Röntgenstrahlen ist begrenzt durch die maximale Spannung der REM Kathode (30kV). Die maximale Auflösung liegt bei 0,001 mm.
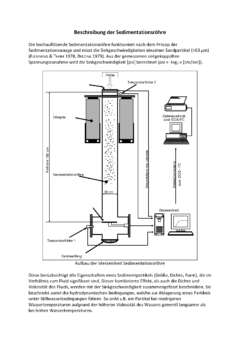
Das Prinzip der Sedimentationsröhre beruht, wie beim Atterberg-Zylinder, auf der Fallgeschwindigkeit der verschiedenen Korngrößen innerhalb eines Zylinders durch eine Flüssigkeit. Die Sedimentprobe muss entsalzen sein und von Schlickanteilen getrennt werden mittels Waschen durch ein 0,063 mm-Sieb. Die Fallgeschwindigkeit ist abhängig von der Kornform, der Oberflächenbeschaffenheit des Kornes und der Temperatur der Flüssigkeit. Diese Parameter werden bei der Berechnung der Korngrößen berücksichtigt.
Mit dem Sedigraph werden die Korngrößen kleiner 0,063 mm mittels Röntgenstrahlen bestimmt. Die Probe muss entsalzen und von organischen Anteilen befreit sein. Der trockene Schlick wird gemahlen und mit Ultraschall homogenisiert. Im Sedigraph wird die Lösung in eine Zelle geladen und über einen bestimmten Zeitraum gemessen, der sich nach der beprobten Korngröße richtet. Die Korngröße ergibt sich aus der sich ändernden Konzentration der Sedimentdichte in der Zelle, die von den Röntgenstrahlen als sich ändernde Durchgangszahlen erfasst werden. Unsicherheitsfaktor dieser Methode ist die nicht zu bestimmende Homogenität und Aufspaltung der Probe mittels Ultraschall. Denn je länger man schallt, desto mehr werden die Tonminerale zersprengt.
Erwerb und Indienststellung: Neubau 1976 in Oldersum/Ostfriesland aus Mitteln des Bundesministers für Forschung und Technologie (90%) und Land Hessen (10%); Länge über alles: 29,71m; Breite auf Spanten: 7,42m; 165 BRT; Antrieb: 470 PS Diesel-Motor (Hauptmaschine); Ausrüstung: Hydraulikkräne, Echograph, Sedimentecholot, Radar, Bordrechner, DECCA, DGPS, SYLEDIS; Fahrgebiet: Kleine Hochseefischerei (gesamte Nord- und Ostsee), Aktionsradius 2000 sm bzw. 14 Tage; Bemannung: 5 (Zweiwachen-Schiff); Eigner: Briese; Hauptcharterer: Senckenberg am Meer.